近日,我校365英国葛明峰教授团队(付智辉、葛明峰、丁腾飞)与华中科技大学人工智能与自动化学院刘智伟教授团队合作的最新研究成果“Task optimization for fixed-time control of intermittent human-robot interaction with time-varying exponents and coefficients”被国际主流期刊《IEEE Transactions on Cybernetics》(2026年1月26日最新影响因子10.5,最新学校分区为T1)在线发表(DOI:10.1109/TCYB.2026.3650907)。该文提出了一种分层固定时间事件触发优化(Hierarchical Fixed-Time Event-Triggered Optimization,HFTEO)算法,旨在提升人类与机器人在动态环境中协作任务的效率与安全性。随着人工智能和机器人技术的快速发展,人机协作系统在工业、医疗、服务等多个领域的应用日益广泛。传统的机器人控制系统通常依赖于精确的指令与数据输入,但在实际应用中,人类操作员的决策往往是不确定和变化的,这对机器人的稳定性和任务执行效率提出了更高的要求。传统的任务优化方法往往依赖于连续和稳定的操作环境,但实际的人机交互通常是间歇性的,且存在不确定性,例如人类操作员的反应时间延迟、意图变化以及机器人控制的响应能力等。这使得如何在不确定的交互环境中确保任务的高效完成,成为一个亟待解决的技术难题。
针对上述问题,本文提出了一种分层固定时间事件触发优化(HFTEO)算法。该算法通过引入Lyapunov固定时间稳定性条件,能够保证系统在参数波动和交互不确定的情况下,仍然能在固定时间内稳定收敛。针对含常数项与不含常数项的李雅普诺夫固定时间稳定性判据不等式,我们均建立了时变指数与系数的李雅普诺夫稳定性条件,从而获得更灵活的收敛轨迹设计自由度——即有效抑制系统在李雅普诺夫稳定平衡点附近的振荡现象与最终误差。
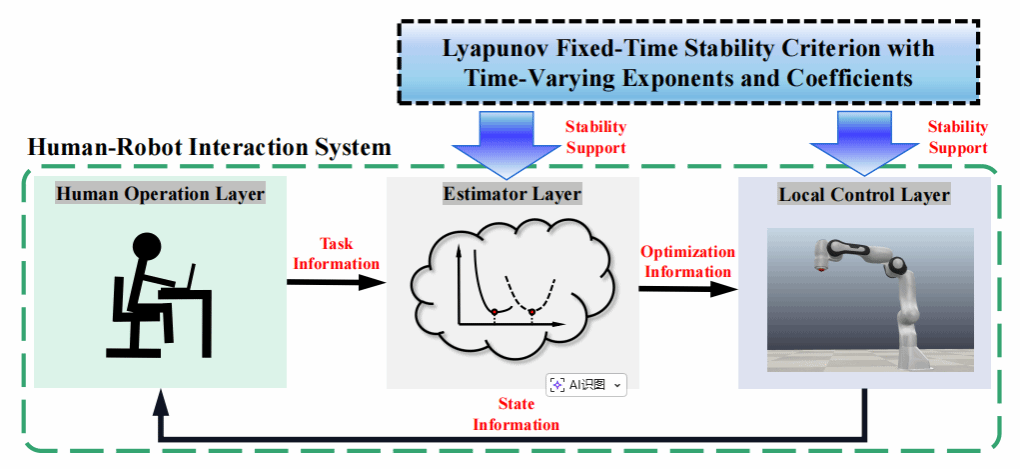
图 1人机交互任务优化问题的逻辑设计图
基于人机交互的HFTEO算法使机器人能与操作员协同高效寻找到帕雷托解,从而提升系统在固定时间内的快速响应性能。根据所提出的时变参数,HFTEO算法可在人机交互优化过程中动态调整最终轮廓,从快速响应和收敛误差的角度,更有利于从时变帕雷托解的搜索中获得优化结果。与现有的优秀事件触发方案不同(这些方案通常需要机器系统内部存储事件更新所需的任务信息组件),本HFTEO算法采用人机协同方案设计:其中与人工分配任务相关的变量为离散型,与任务无关的信息为连续型,从而实现事件更新与机器人操作的独立性,有效隔离潜在的恶意访问和攻击行为。
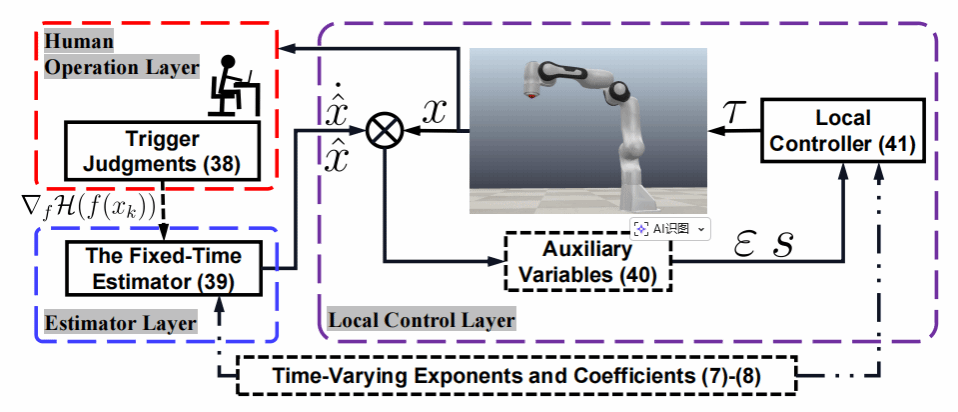
图 2 HFTEO算法结构
该研究成果受到国家自然科学基金资助。
论文信息:
Title: Task optimization for fixed-time control of intermittent human-robot interaction with time-varying exponents and coefficients
Authors: Zhi-Hui Fu, Ming-Feng Ge(通讯作者), Teng-Fei Ding, Zhi-Wei Liu
Source: IEEE Transactions on Cybernetics
DOI: 10.1109/TCYB.2026.3650907
Published online: 2026年1月23日



{kind=link}