近日,365英国葛明峰教授团队(丁腾飞、易子恒、葛明峰)在模糊系统领域权威期刊《IEEE Transactions on Fuzzy System》(IF=11.9)发表研究成果。该文提出了一种新型的基于分层控制框架的预定时间模糊控制算法,解决了具有通信链路故障和模型不确定性的多无人船系统的时变编队控制问题。
在复杂多变的海洋环境中,网络化无人艇集群执行协同任务时,不仅面临模型强非线性、外部扰动及通信链路动态故障等技术挑战,更需对突发险情或任务变更作出快速响应—这使得完全自主的控制策略难以兼顾安全性与灵活性。为此,亟需引入人类操作者的高层决策能力,构建“人在回路”(Human-in-the-Loop, HiTL)的智能协同机制。现有HiTL方法多局限于指数或有限时间收敛,且未充分考虑通信拓扑动态退化下的稳定性保障,难以满足高时效性海洋任务的需求。
针对上述问题,本研究提出一种分层式预设时间模糊控制框架,首次将手势识别驱动的人机协同策略、通信链路故障下的鲁棒估计与预设时间模糊滑模控制有机融合,实现了对网络化无人艇集群时变编队的高效、可靠引导。在上层,设计分布式编队跟踪层:通过手势识别系统将操作者的手势指令实时转化为虚拟领航者的加速度输入,使编队轨迹可由人类按需动态调整;同时,构建抗通信链路故障的分布式状态估计器,在有向图拓扑下确保所有跟随艇能在用户指定的预设时间内精确重构虚拟领航者状态。在下层,构建局部模糊控制层:引入预设时间滑模面,并结合自适应模糊逻辑系统在线逼近模型不确定性与未知扰动,使每艘无人艇的跟踪误差在另一独立预设时间内收敛至邻域内,且稳态精度可控。
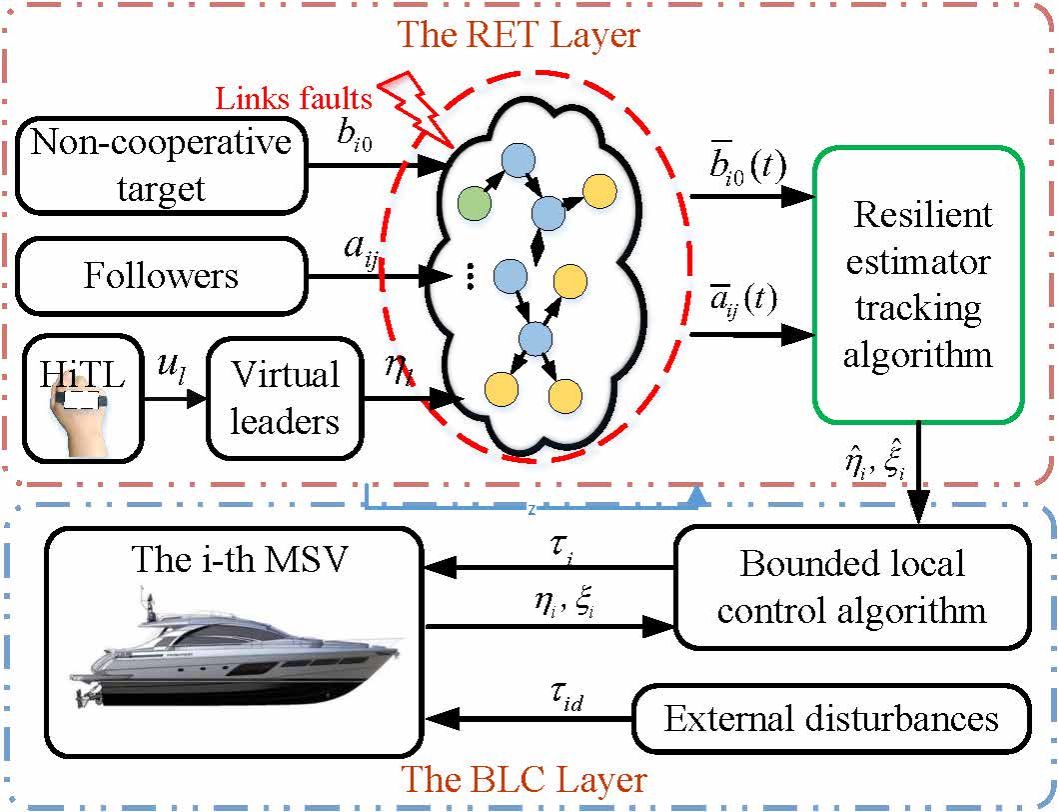
图1 多无人船系统的“人在环”预定时间时变编队控制算法框架
为定量评估所提出算法相较于PTOB算法和DAFC算法的性能优势,我们引入最优协同误差作为评价指标。仿真结果表明,所提算法的稳态误差最小,并且误差收敛极小值时所用的调整时间也最短。此外,所提算法所产生的累积误差也明显小于PTOB算法和DAFC算法。综上所述,无论是在收敛速度、稳态精度还是整体协同性能方面,所提出的算法都展现了相对于PTOB和DAFC算法的显著优越性。本研究不仅解决了HiTL机制与预设时间控制在非线性海洋系统中的深度融合难题,更首次在存在通信链路动态故障的严苛条件下实现了人机协同的快速、稳定编队重构,为未来海上应急救援、动态围捕等需人机联合决策的高风险任务提供了可靠的技术范式。
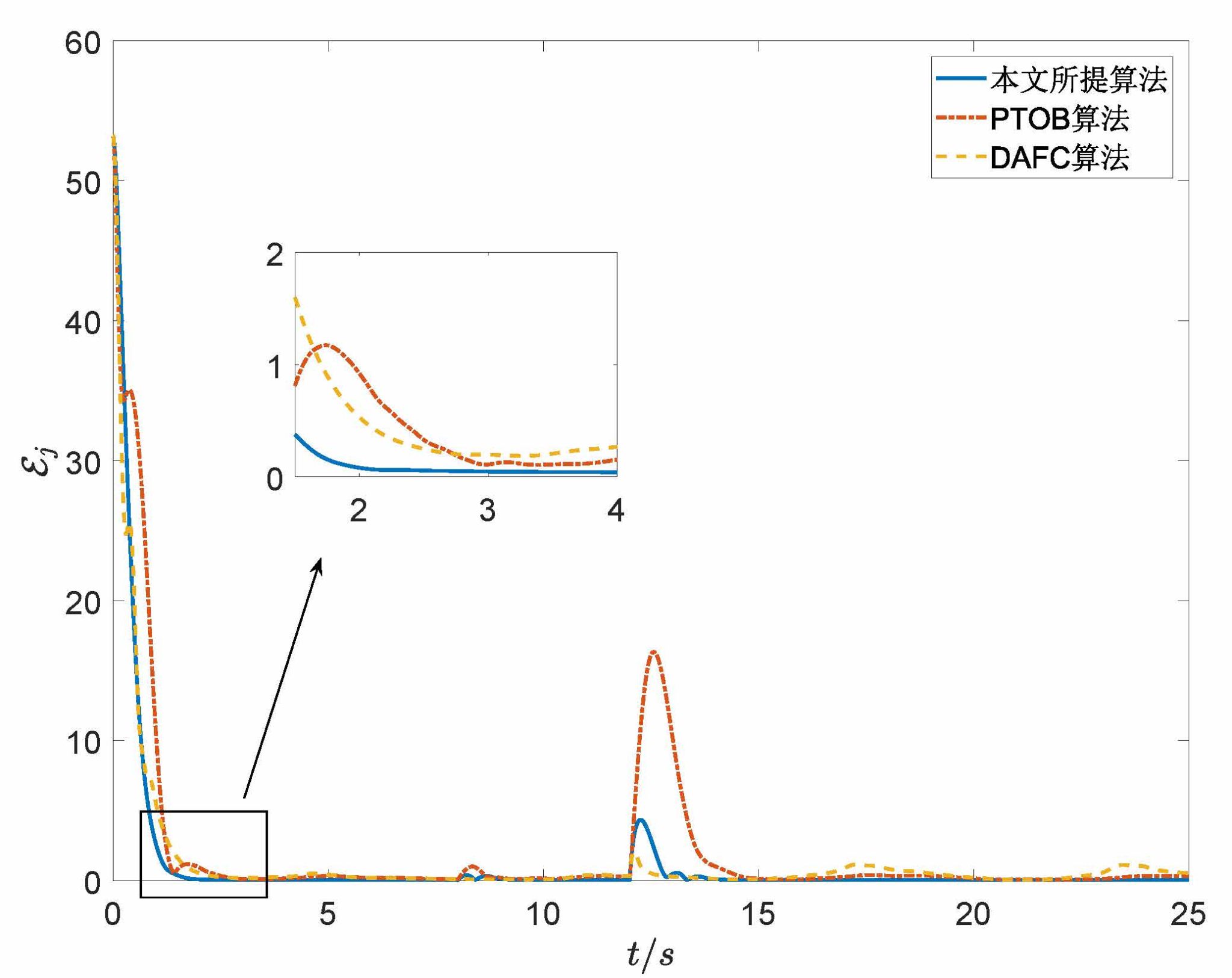
图2 三种算法的最优协同误差对比效果图
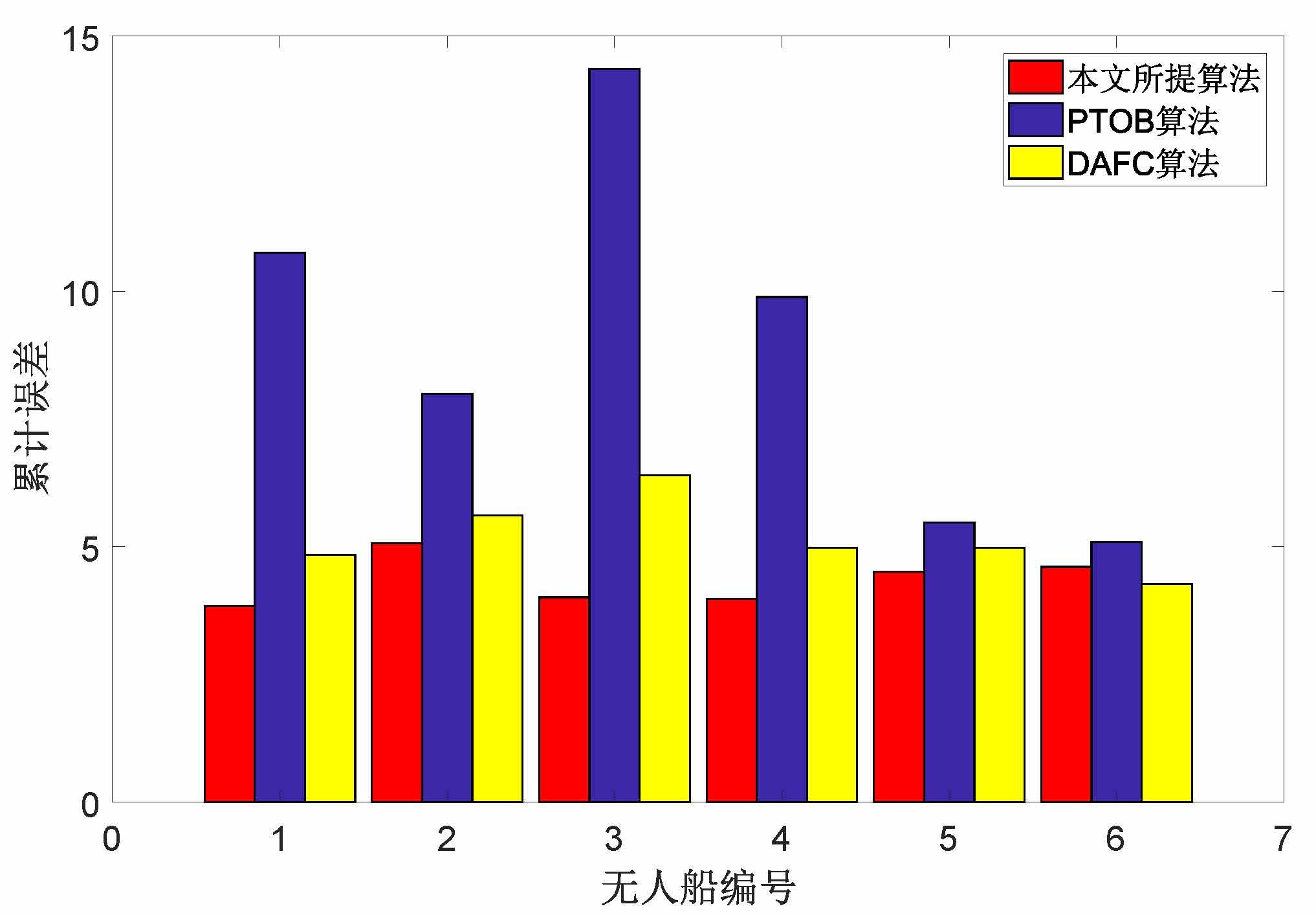
图3 三种算法的累计误差对比效果图
近年来,由葛明峰教授领衔的“复杂机电系统智能感知与先进控制导学团队”开展了一系列群集智能网络的先进协同控制和优化博弈方法的研究,实验室研究范围涵盖具身智能多模态交互系统、人机协作集群系统、多维度群集智能网络、智能电力系统等诸多科研项目。
图4 我校机械与电子信息学院“复杂机电系统智能感知与先进控制导学团队”
该研究成果受到国家自然科学基金、深圳市科技项目的资助。
论文信息:
Title: Human-in-the-Loop Time-Varying Formation Control for NMSVs With Communication Links Faults: A Prescribed-Time Fuzzy Controller
Authors: Teng-Fei Ding, Zi-Heng Yi, Ming-Feng Ge
Source: IEEE Transactions on Fuzzy System
DOI: 10.1109/TFUZZ.2025.3618673
Published online: 07 October 2025



{kind=link}